Material teoretic Puteți solicita în sfârșit sfatul unui specialist
Vă rugăm să predați acest manuscris editorului - un cuvânt introductiv („Te întreb”); Spune-mi te rog cât de curajos este! - intreg...
Această teoremă stabilește o relație cantitativă între munca unei forțe (cauză) și energia cinetică a unui punct material (efect).
Energia cinetică a unui punct material este o mărime scalară egală cu jumătate din produsul dintre masa unui punct și pătratul vitezei acestuia
 .
(43)
.
(43)
Energia cinetică caracterizează acțiunea mecanică a forței care poate fi transformată în alte tipuri de energie, de exemplu, termică.
Munca de forta la o deplasare dată este caracteristica acţiunii forţei care duce la modificarea modulului de viteză.
Munca elementară de forță este definit ca produsul scalar al vectorului forță și vectorului elementar de deplasare în punctul de aplicare a acestuia

 ,
(44)
,
(44)
Unde  - miscare elementara.
- miscare elementara.
Modulul de lucru elementar este determinat de formula
Unde
- unghiul dintre vectorul forță și vectorul elementar de deplasare;  - proiecția vectorului forță pe tangentă.
- proiecția vectorului forță pe tangentă.
Lucrul total pe o deplasare finită este determinat de integrală
 .
(46)
.
(46)
Din (46) rezultă că munca totală poate fi calculată în două cazuri, când forța este constantă sau depinde de deplasare.
La F=const obținem  .
.
Când rezolvați probleme, este adesea convenabil să folosiți metoda analitică de calcul a forței
Unde F X , F y , F z– proiecții de forță pe axele de coordonate.
Să demonstrăm următoarea teoremă.
Teorema: Modificarea energiei cinetice a unui punct material la o parte din deplasarea sa este egală cu munca forței care acționează asupra punctului la aceeași deplasare.
Fie un punct material M de masă m se deplasează sub influența forței F de la poziția M 0 la poziția M 1.
OUD:  .
(47)
.
(47)
Să introducem înlocuirea  și proiectați (47) pe tangentă
și proiectați (47) pe tangentă
 .
(48)
.
(48)
Separăm variabilele din (48) și integrăm

Ca rezultat obținem
 .
(49)
.
(49)
Ecuația (49) demonstrează teorema formulată mai sus.
Teorema este convenabilă de utilizat atunci când parametrii dați și căutați includ masa unui punct, viteza inițială și finală a acestuia, forțele și deplasarea.
1. Munca gravitatiei se calculează ca produsul dintre modulul de forță și deplasarea verticală a punctului de aplicare a acestuia
 .
(50)
.
(50)
La deplasarea în sus, munca este pozitivă, la deplasarea în jos, este negativă.
2. Lucrul forței elastice a unui arc F=-cx egal cu
 ,
(51)
,
(51)
Unde X 0 – alungirea (comprimarea) inițială a arcului;
X 1 – alungirea (comprimarea) finală a arcului.
Munca gravitației și a forței elastice nu depinde de traiectoria de mișcare a punctelor lor de aplicare. Se numesc astfel de forțe, a căror activitate nu depinde de traiectorie forțe potențiale.
3. Lucrul forței de frecare.
Deoarece forța de frecare este întotdeauna îndreptată în direcția opusă direcției de mișcare, lucrul ei este egal cu
Munca efectuată de forța de frecare este întotdeauna negativă. Sunt numite forțe a căror activitate este întotdeauna negativă disipativ.
Teorema demonstrată în § 89 este valabilă pentru orice punct din sistem. Prin urmare, dacă luăm în considerare orice punct al sistemului cu masă și viteză, atunci pentru acest punct va fi
unde sunt lucrările elementare ale forţelor externe şi interne care acţionează asupra unui punct. Compilând astfel de ecuații pentru fiecare dintre punctele sistemului și adunându-le termen cu termen, aflăm că
Egalitatea (49) exprimă teorema despre modificarea energiei cinetice a sistemului în formă diferențială. După ce am integrat ambele părți ale acestei egalități în limitele corespunzătoare mișcării sistemului dintr-o poziție inițială, unde energia cinetică este egală cu o poziție în care valoarea energiei cinetice devine egală, obținem
Această ecuație exprimă teorema despre modificarea energiei cinetice într-o altă formă (integrală): modificarea energiei cinetice a unui sistem în timpul unei mișcări este egală cu suma muncii efectuate asupra acestei mișcări a tuturor forțelor externe și interne aplicate la sistemul.
Spre deosebire de teoremele anterioare, forțele interne din ecuațiile (49) sau (50) nu sunt excluse. De fapt, dacă sunt forțele de interacțiune între punctele sistemului (Fig. 309), atunci

Dar în acest caz, punctul se poate deplasa în direcția lui și punctul se poate deplasa în direcția lui. De exemplu, în timpul unei împușcături (vezi problema 127 din § 112), forțele de presiune ale gazelor pulbere, care sunt interne pentru sistemul de piese de recul proiectilului, lucrează și conferă viteză corpurilor sistemului.
Să luăm în considerare două cazuri speciale importante.
1. Sistem imuabil. Vom numi un sistem mecanic neschimbabil în care distanța dintre fiecare două puncte de interacțiune rămâne constantă pe tot parcursul mișcării.
Să considerăm două puncte ale unui sistem neschimbabil care acționează unul asupra celuilalt cu forțe (vezi Fig. 309). Atunci, deoarece atunci când segmentul se mișcă ar trebui să existe (vezi § 55), atunci și, respectiv, vitezele și deplasările elementare ale punctelor. Ca urmare, pentru suma lucrărilor elementare ale acestor forțe obținem
Același lucru se va întâmpla pentru toate celelalte puncte de interacțiune ale sistemului. Ca urmare, ajungem la concluzia că, în cazul unui sistem neschimbabil, suma muncii tuturor forțelor interne este egală cu zero și ecuațiile (49) sau (50) iau forma
2. Sistem cu conexiuni ideale. Să luăm în considerare un sistem asupra căruia se impun conexiuni care nu se modifică în timp. Să împărțim toate forțele externe și interne care acționează asupra punctelor sistemului în conexiuni active și de reacție. Atunci ecuația (49) poate fi reprezentată ca
unde este munca elementară a forțelor active externe și interne care acționează asupra unui punct din sistem și este munca elementară a reacțiilor impuse în același punct de conexiuni externe și interne.
După cum vedem, modificarea energiei cinetice a sistemului depinde de munca și forțele active și reacțiile legăturilor. Cu toate acestea, este posibil să se introducă conceptul de astfel de sisteme mecanice „ideale” în care prezența conexiunilor nu afectează modificarea energiei cinetice a sistemului în timpul mișcării acestuia. Pentru astfel de conexiuni, condiția trebuie în mod evident îndeplinită
Dacă pentru conexiunile care nu se modifică în timp, suma muncii tuturor reacțiilor în timpul unei deplasări elementare a sistemului este egală cu zero, atunci astfel de conexiuni sunt ideale Să indicăm un număr de tipuri de conexiuni ideale cunoscute de noi.
În § 89 s-a stabilit că, dacă legătura este o suprafață (sau curbă) staționară, frecarea despre care poate fi neglijată, atunci când corpurile alunecă de-a lungul unei astfel de suprafețe (curbă), lucrul de reacție N este egal cu zero. Apoi, în § 122 se arată că, dacă neglijăm deformațiile, atunci când un corp se rostogolește fără alunecare pe o suprafață rugoasă, lucrul reacției normale N și a forței de frecare (adică componenta tangențială a reacției) este egal cu zero. . În plus, lucrul de reacție R al balamalei (vezi Fig. 10 și 11), dacă neglijăm frecarea, va fi, de asemenea, egal cu zero, deoarece punctul de aplicare al forței R rămâne staționar pentru orice mișcare a sistemului. În cele din urmă, dacă în fig. 309 considerați punctele materiale ca fiind legate printr-o tijă rigidă (inextensibilă), atunci forțele vor fi reacții ale tijei; munca fiecăreia dintre aceste reacții la mutarea sistemului nu este egală cu zero, dar suma acestor lucrări, așa cum s-a dovedit, dă zero. Astfel, toate conexiunile de mai sus pot fi considerate ideale, ținând cont de rezervele făcute.
Pentru un sistem mecanic asupra căruia se impun doar conexiuni ideale care nu se modifică în timp, vor exista
Astfel, modificarea energiei cinetice a unui sistem cu conexiuni ideale care nu se modifică în timp în timpul vreunei mișcări a acestuia este egală cu suma muncii asupra acestei mișcări a forțelor active externe și interne aplicate sistemului.
Toate teoremele anterioare au făcut posibilă excluderea forțelor interne din ecuațiile de mișcare, dar toate forțele externe, inclusiv reacțiile necunoscute anterior ale conexiunilor externe, au fost reținute în ecuații. Valoarea practică a teoremei privind modificarea energiei cinetice este că, cu conexiunile ideale neschimbându-se în timp, permite excluderea din ecuațiile de mișcare a tuturor reacțiilor necunoscute anterior ale conexiunilor.

sistem mecanic
Energia cinetică a unui sistem mecanic este suma aritmetică a energiilor cinetice ale tuturor punctelor sale materiale
Calcularea energiei cinetice a unui solid
1. Mișcare înainte
După cum se știe, în timpul mișcării de translație vitezele tuturor punctelor corpului în același moment în timp sunt egale, atunci (83) poate fi reprezentat sub forma
 .
(84)
.
(84)
Când un corp se deplasează înainte, energia sa cinetică este egală cu jumătate din produsul masei și pătratul vitezei centrului de masă.
2. Mișcarea de rotație a unui corp rigid
P  În timpul mișcării de rotație, viteza fiecărui punct al corpului
În timpul mișcării de rotație, viteza fiecărui punct al corpului
 .
(85)
.
(85)
Să înlocuim (85) în (83):
 .
.
Ținând cont de (59), obținem
 .
(86)
.
(86)
În timpul mișcării de rotație, energia cinetică este egală cu jumătate din produsul momentului de inerție al corpului față de axa de rotație și pătratul vitezei unghiulare.
3 . Mișcare plată
Mișcarea plană poate fi reprezentată ca rotație față de un pol (de exemplu, centrul de masă) și mișcare împreună cu polul, apoi
 .
(87)
.
(87)
Energia cinetică a unui corp în mișcare plană este egală cu suma energiilor cinetice din mișcarea de translație împreună cu centrul de masă și mișcarea de rotație față de centrul de masă.
Teorema: Modificarea energiei cinetice a unui sistem mecanic la o anumită deplasare este egală cu suma muncii efectuate de toate forțele interne și externe ale sistemului la aceeași deplasare.
 .
(88)
.
(88)
Note:
1. Valoarea introdusă a energiei cinetice a sistemului, în contrast cu impulsul sistemului și momentul cinetic, este o mărime scalară. în care:
Q=0 pentru mișcare de rotație și repaus;
K O=0 în timpul mișcării de translație sau în repaus;
T
Astfel, spre deosebire de teorema privind modificarea momentului și a momentului unghiular, această teoremă este potrivită pentru studiul oricărui tip de mișcare, deoarece T=0 numai pentru un sistem staționar.
2. Spre deosebire de teoremele menționate, această teoremă ține cont de acțiunea forțelor interne ale sistemului.
1. Munca de moment de fortaM Z față de axă este egală cu produsul momentului și unghiului de rotație corp raportat la ax
 .
(89)
.
(89)
2. Suma muncii forțelor interne a unui corp absolut rigid (nedeformabil) este întotdeauna zero.
3.
Lucrul cuplului de frecare la rulare .
.
 ,
,
Unde - coeficient de frecare la rulare;
R– raza cilindrului;
s– lungimea arcului egală cu segmentul de drum parcurs de centrul de masă C de-a lungul suprafeței;
 - unghiul de rotatie al axelor cilindrilor in timpul miscarii;
- unghiul de rotatie al axelor cilindrilor in timpul miscarii;
N– reacție normală la suprafață;
P- gravitatie;
F tr– forța de frecare de alunecare.
1. Mișcare înainte
În timpul mișcării de translație, toate punctele corpului se mișcă pe aceleași traiectorii și în același moment au aceleași accelerații. Apoi, pentru a descrie mișcarea, putem folosi teorema privind mișcarea centrului de masă (67). Proiectăm această ecuație pe axele de coordonate
Sistemul (90) reprezintă ecuații diferențiale ale mișcării de translație a unui corp rigid.
2. Mișcarea de rotație
P  Un corp rigid se rotește în jurul unei axe sub influența forțelor. Caracteristica dinamică a mișcării de rotație a unui corp rigid este momentul cinetic K z, iar caracteristica acțiunii de rotație a unei forțe este momentul forței raportat la axă. Prin urmare, pentru a descrie mișcarea de rotație a unui corp rigid în raport cu o axă fixă, folosim teorema privind modificarea momentului cinetic (81)
Un corp rigid se rotește în jurul unei axe sub influența forțelor. Caracteristica dinamică a mișcării de rotație a unui corp rigid este momentul cinetic K z, iar caracteristica acțiunii de rotație a unei forțe este momentul forței raportat la axă. Prin urmare, pentru a descrie mișcarea de rotație a unui corp rigid în raport cu o axă fixă, folosim teorema privind modificarea momentului cinetic (81)
 .
(91)
.
(91)
În timpul mișcării de rotație  , Apoi
, Apoi
 ,
,
având în vedere că eu z=const, până la urmă obținem
 .
(92)
.
(92)
Ecuația (92) este o ecuație diferențială pentru mișcarea de rotație a unui corp rigid în jurul unei axe fixe.
Unghi găsit va determina poziția unui corp care efectuează o mișcare de rotație în orice moment.
3. Mișcare plată
Poziția unui corp care efectuează o mișcare plană în orice moment este determinată de poziția stâlpului și de unghiul de rotație al corpului față de pol. Dacă luăm ca pol centrul de masă al corpului, atunci ecuația mișcării acestuia poate fi găsită folosind teorema privind mișcarea centrului de masă (67), iar mișcarea de rotație față de centru va fi determinată de ecuația (92), care este valabilă și pentru mișcarea sistemului în raport cu axa care trece prin centrul de masă. Atunci ecuațiile diferențiale ale mișcării plane ale unui corp rigid au forma
2.4.1. Energia cinetică a unui sistem mecanic. Energia cinetică a unui punct material de masă care se mișcă cu viteza se numește mărime
Energia cinetică a unui sistem mecanic este suma energiilor cinetice ale punctelor materiale incluse în acest sistem:
În cazurile în care masa sistemului este distribuită continuu, însumarea din expresia (7) este înlocuită cu integrarea pe aria de distribuție.
Relația dintre valorile energiei cinetice a unui sistem mecanic în două sisteme de referință, dintre care unul staționar, iar celălalt se mișcă translațional cu viteză, unde punctul C este centrul de masă al sistemului mecanic, este dată de Teorema lui Koenig:
![]() . (8)
. (8)
Aici ![]() - energia cinetică a unui sistem mecanic într-un sistem de coordonate în mișcare.
- energia cinetică a unui sistem mecanic într-un sistem de coordonate în mișcare.
Folosirea expresiilor (6, 7, 8) vă permite să scrieți formule pentru calcularea energiei cinetice a unui corp solid:
Când un corp de masă se deplasează înainte cu viteză
Când se rotește cu viteză unghiulară în jurul unei axe fixe a unui corp cu un moment de inerție
în mișcare plan-paralelă a unui corp rigid cu viteză unghiulară la o valoare a momentului central de inerție față de axa perpendiculară pe planul de mișcare și o valoare a momentului de inerție față de axa instantanee de rotație
![]() . (11)
. (11)
2.4.2. Caracteristicile energetice. Caracteristicile energetice ale unei forțe includ puterea, munca și energia potențială.
Putere forța, al cărei punct de aplicare se mișcă cu viteza, se numește mărime
Loc de munca putere pe un interval elementar timpul și deplasarea elementară a punctului de aplicare corespunzător acestei perioade de timp este determinată de regulă
Muncă putere pe un interval finit timpul și modificarea corespunzătoare a razei - vectorul punctului de aplicare a acestei forțe de la - se numește mărime
 . (14)
. (14)
Lucrul efectuat de momentul unei perechi de forțe este calculat într-un mod similar.
Energia potențială este definită numai în cazurile în care expresia (13) este o diferență totală:
Când condiția (15) este îndeplinită, se spune că forța este potențială. Relații care leagă proiecțiile de forță pe axa sistemului de coordonate selectat cu funcția:
Dacă punctul de aplicare al forței s-a deplasat din poziție în poziție, atunci prin integrarea (15) putem obține
 . (17)
. (17)
Notă: energia potențială este determinată până la un termen constant; Caracteristica remarcată ne permite să presupunem că energia potențială este egală cu zero într-un punct pe care îl alegem (de exemplu, la originea coordonatelor).
În cazul în care pentru mulțimea de forțe care acționează asupra unui sistem mecanic, este posibil să se noteze expresia energiei potențiale, sistemul mecanic se numește conservator. Astfel de sisteme mecanice au caracteristici importante - munca forțelor care acționează nu depinde de tipul de traiectorie și de legea mișcării de-a lungul acesteia; munca atunci când se deplasează de-a lungul unei bucle închise este zero.
Condiții în care există o funcție:
2.4.3. Teorema privind modificarea energiei cinetice. Scrierea teoremei privind modificarea energiei cinetice a unui sistem mecanic sub formă diferențială:
Derivata în timp a energiei cinetice a unui sistem mecanic este egală cu puterea forțelor externe și interne.
Forma integrală de scriere a teoremei privind modificarea energiei cinetice
![]() , (20)
, (20)
Unde ; ; ; .
În cazul particular în care expresia energiei potențiale poate fi scrisă pentru totalitatea forțelor externe și interne ale sistemului, legea conservării energiei mecanice totale este îndeplinită.
iar sistemul în sine se dovedește a fi conservator.
EXEMPLU 3. Pentru sistemul mecanic prezentat în Fig. 2, obțineți o ecuație diferențială pentru mișcarea sarcinii.
SOLUŢIE. Să folosim teorema privind modificarea energiei cinetice în formă diferenţială (19). Să ne eliberăm mental de conexiuni aplicând reacții adecvate corpurilor sistemului mecanic (vezi Fig. 2). Notă: forțele aplicate la centrul staționar de masă al blocului coaxial nu sunt reprezentate, deoarece puterea lor este zero.

Să creăm o expresie pentru energia cinetică a unui sistem mecanic.
Energia cinetică a unui sistem mecanic este suma energiilor cinetice ale tuturor punctelor sale materiale:
Să calculăm diferența din expresia energiei cinetice și să efectuăm câteva transformări simple:

Omitând valorile intermediare și folosind simbolul introdus anterior pentru a desemna munca elementară, scriem:

Deci, diferența de energie cinetică a unui sistem mecanic este egală cu suma lucrărilor elementare ale tuturor forțelor externe și interne care acționează asupra punctelor sistemului. Acesta este conținutul teoremei privind modificarea energiei cinetice.
Rețineți că suma muncii efectuate de forțele interne ale sistemului nu este egală cu zero în cazul general. Dispare doar în unele cazuri speciale: când sistemul este un corp absolut rigid; un sistem de corpuri absolut rigide care interacționează cu ajutorul unor elemente nedeformabile (balamale ideale, tije absolut rigide, fire inextensibile etc.). Din acest motiv, teorema privind modificarea energiei cinetice este singura dintre teoremele generale de dinamică care ține cont de efectul forțelor interne.
Poate fi interesat de schimbarea energiei cinetice nu pe o perioadă infinitezimală de timp, așa cum s-a făcut mai sus, ci pe o anumită perioadă finită de timp. Apoi, folosind integrarea, putem obține:

Aici - valorile energiei cinetice, respectiv, în momente de timp - suma muncii totale a forțelor externe și interne pentru perioada de timp considerată.
Egalitatea rezultată exprimă teorema privind modificarea energiei cinetice într-o formă finală (integrală), care poate fi formulată astfel: modificarea energiei cinetice în timpul tranziției unui sistem mecanic de la o poziție la alta este egală cu suma lui munca totală a tuturor forțelor externe și interne.

Vă rugăm să predați acest manuscris editorului - un cuvânt introductiv („Te întreb”); Spune-mi te rog cât de curajos este! - intreg...
Proiectul Cosmos este realizat de elevi din clasele a 2-a, a 3-a, a 4-a și chiar a 5-a. Copiii își extind cunoștințele despre spațiu, secretele acestuia, astronauți,...
Cursuri la disciplina „Geografia socio-economică a țărilor străine” „Dezvoltarea socio-economică...
Definiție Între orice corp care are mase, acționează forțe care atrag corpurile menționate mai sus unele la altele...

Sentimentul este. Sentiment în psihologie. Funcții și tipuri de senzații Senzația este una dintre cele mai simple și în același timp...

Profesor: Serebryakova Tatyana Alekseevna Centrul Educațional Central Primul Gimnaziu European al lui Petru cel Mare Harta tehnologică a lecției...
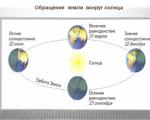
Din cele mai vechi timpuri, oamenii au fost interesați de motivul pentru care noaptea face loc zilei, iarna primăvara și vara toamna. Mai târziu, când...

„Istoria țării noastre natale”, dedicată aniversării a 100 de ani de la revoluția din 1917 din RusiaPrefață La începutul secolului al XX-lea în...

Ce sunete scot iepurii zgârieturi, foșnet, mormăit =)) și când crește, urlă! Acestea sunt...
Bătrânul și bătrâna sunt vorbăreț. Basm!! .... Era odată un bătrân și o bătrână. Bătrâna nu știa să vorbească...

Înapoi înainte Atenție! Previzualizările diapozitivelor au doar scop informativ...

SARCINA 19. SEMNE DE PONTAȚIE ÎNTR-O PROPOZIȚIE COMPLEXĂ CU DIFERITE TIPURI DE CONEXIUNE Formularea sarcinii: locul...
O împrejurare este un membru minor al unei propoziții care denotă un semn al unei acțiuni sau al unui alt semn...
Biografia și opera sa dezvăluie personalitatea unui rebel, o persoană care nu se consideră într-o eră a fărădelegii generale...
Proiectul Cosmos este realizat de elevi din clasele a 2-a, a 3-a, a 4-a și chiar a 5-a. Copiii își extind cunoștințele despre spațiu, secretele acestuia,...
Cursuri la disciplina „Geografia socio-economică a țărilor străine”...