Theoretisches Material Endlich können Sie sich von einem Spezialisten beraten lassen
Bitte übergeben Sie dieses Manuskript dem Herausgeber – ein einleitendes Wort („Ich bitte Sie“); Bitte sag mir, wie mutig er ist! - ganz...
Raster und Vorlage. Bei den meisten Differenzschemata liegen die Gitterknoten am Schnittpunkt einiger gerader Linien (bei mehrdimensionalen Problemen - Hyperebenen), die entweder in einem natürlichen Koordinatensystem oder in einem speziell in der Form ausgewählten Bereich gezeichnet werden G.
Wenn eine der Variablen eine physikalische Zeitbedeutung hat T, dann wird das Gitter normalerweise so konstruiert, dass sich zwischen seinen Linien (oder Hyperebenen) Linien befinden T = T M. Eine Menge von Gitterknoten, die auf einer solchen Linie oder Hyperebene liegen, wird als Schicht bezeichnet.
Auf jeder Ebene werden Richtungen identifiziert, entlang derer sich nur eine Raumkoordinate ändert. Zum Beispiel für Variablen X, j, T Es gibt Wegbeschreibungen X (T = const, j = const) und Richtung j (T = const, X = const).
Bei der Zusammenstellung der Differenzenschemata (26.2) und (26.4) verwendeten wir die gleiche Art der Differenzennäherung von Ableitungen an allen internen Knoten der Domäne. Mit anderen Worten: Beim Schreiben jeder Differenzengleichung um einen bestimmten Gitterknoten wurde die gleiche Anzahl von Knoten genommen und so eine streng definierte Konfiguration gebildet, die wir als Vorlage für dieses Differenzenschema bezeichneten (siehe Abb. 26.2).
Definition. Die Knoten, in denen das Differenzschema auf der Vorlage geschrieben ist, werden als regelmäßig bezeichnet, der Rest als unregelmäßig.
Unregelmäßig sind normalerweise die Randknoten und manchmal auch die Knoten, die in der Nähe der Grenze liegen (so dass das in der Nähe dieses Knotens aufgenommene Muster über die Grenze der Region hinausgeht).
Die Erstellung eines Differenzschemas beginnt mit der Auswahl einer Vorlage. Die Vorlage definiert das Differenzschema nicht immer eindeutig, beeinflusst aber dessen Eigenschaften maßgeblich; Zum Beispiel werden wir später sehen, dass in der Vorlage Abb. 26.2 B Es ist unmöglich, ein gutes Differenzenschema für das Wärmeleitungsproblem (26.1) zu erstellen. Für jede Art von Gleichungen und Randwertproblemen ist eine eigene Vorlage erforderlich.
Lassen Sie uns die Frage der tatsächlichen Berechnung der Differenzlösung diskutieren. Die meisten physikalischen Probleme führen zu Gleichungen, die die Zeit als eine der Variablen enthalten. Für solche Gleichungen wird üblicherweise ein gemischtes Randwertproblem gestellt, dessen typischer Fall das Wärmeleitungsproblem (26.1) ist.
Für solche Probleme wird ein schichtweiser Berechnungsalgorithmus verwendet. Betrachten wir es am Beispiel der Schemata (26.2) und (26.4).
Im Schema (26.4) auf der Originalebene M= 0 ist die Lösung aufgrund der Anfangsbedingung bekannt. Lasst uns M= 0 in Gleichungen (26.4). Dann für jeden Indexwert N die Gleichung enthält eine Unbekannte  ; Von hier aus können wir bestimmen
; Von hier aus können wir bestimmen  bei
bei  Werte
Werte  Und
Und  werden durch Randbedingungen (26.3) bestimmt. Somit werden die Werte in der ersten Ebene berechnet. Mit ihnen wird die Lösung auf der zweiten Schicht auf ähnliche Weise berechnet usw.
werden durch Randbedingungen (26.3) bestimmt. Somit werden die Werte in der ersten Ebene berechnet. Mit ihnen wird die Lösung auf der zweiten Schicht auf ähnliche Weise berechnet usw.
Schema (26.4) enthält in jeder Gleichung nur einen Wert der Funktion auf der nächsten Ebene; Dieser Wert lässt sich leicht explizit durch die bekannten Werte der Funktion auf der Originalebene ausdrücken, weshalb solche Schemata als explizit bezeichnet werden.
Schema (26.2) enthält in jeder Gleichung mehrere unbekannte Werte der Funktion auf einer neuen Ebene; Solche Schemata werden implizit genannt. Um die Lösung tatsächlich zu berechnen, schreiben wir Schema (26.2) unter Berücksichtigung der Randbedingung (26.3) in der folgenden Form um
 (26.5)
(26.5)
Auf jeder Schicht ist Schema (26.5) ein System linearer Gleichungen zur Bestimmung der Größen  ; Die rechten Seiten dieser Gleichungen sind bekannt, da sie die Lösungswerte aus der vorherigen Schicht enthalten. Die Matrix des linearen Systems ist tridiagonal und die Lösung kann durch algebraischen Sweep berechnet werden.
; Die rechten Seiten dieser Gleichungen sind bekannt, da sie die Lösungswerte aus der vorherigen Schicht enthalten. Die Matrix des linearen Systems ist tridiagonal und die Lösung kann durch algebraischen Sweep berechnet werden.
Der jetzt betrachtete Algorithmus ist recht typisch. Es wird in vielen impliziten Differenzenschemata für eindimensionale und mehrdimensionale Probleme verwendet. Als nächstes werden wir statt des Index M Verwenden Sie häufig Abkürzungen

In dieser Notation nehmen die expliziten und impliziten Differenzschemata jeweils die folgende Form an:


Restwert. Betrachten wir eine Operator-Differentialgleichung allgemeiner Form (nicht unbedingt linear).
Au = F, oder Au – F = 0.
Betreiber ersetzen A Differenzoperator A H, rechte Seite F– einige Rasterfunktionen  , und die genaue Lösung u– Differenzlösung j, schreiben wir das Differenzschema
, und die genaue Lösung u– Differenzlösung j, schreiben wir das Differenzschema
 oder
oder  .
(26.6)
.
(26.6)
Wenn wir die genaue Lösung ersetzen u in Beziehung (26.6), dann wird die Lösung diese Beziehung im Allgemeinen nicht erfüllen  . Größe
. Größe
wird als Residuum bezeichnet.
Das Residuum wird normalerweise mithilfe einer Taylor-Reihenentwicklung geschätzt. Lassen Sie uns zum Beispiel das Residuum des expliziten Differenzenschemas (26.4) für die Wärmegleichung (26.1a) ermitteln. Schreiben wir diese Gleichung in kanonischer Form

Denn in diesem Fall  Das
Das

Erweitern wir die Lösung mithilfe der Taylor-Formel in der Nähe des Knotens ( X N , T M), unter der Annahme, dass es stetige vierte Ableitungen nach gibt X und Zweiter in T
 (26.7)
(26.7)
Wo 
Ersetzen Sie diese Erweiterungen in den Ausdruck des Residuums und vernachlässigen Sie aufgrund der Kontinuität der Ableitungen den Mengenunterschied  aus ( X N ,
T M)
wir werden finden
aus ( X N ,
T M)
wir werden finden
 (26.8)
(26.8)
Somit tendiert die Diskrepanz (26.8) gegen Null  Und
Und  Die Nähe des Differenzenschemas zum ursprünglichen Problem wird durch die Größe des Residuums bestimmt. Wenn die Abweichung gegen Null tendiert H Und
Die Nähe des Differenzenschemas zum ursprünglichen Problem wird durch die Größe des Residuums bestimmt. Wenn die Abweichung gegen Null tendiert H Und  gegen Null tendiert, dann sagen wir, dass ein solches Differenzenschema ein Differentialproblem annähert. Die Näherung hat R te Bestellung, wenn
gegen Null tendiert, dann sagen wir, dass ein solches Differenzenschema ein Differentialproblem annähert. Die Näherung hat R te Bestellung, wenn  .
.
Ausdruck (26.8) gibt die Diskrepanz nur an regulären Gitterknoten an. Wenn wir (26.3) und (26.1b) vergleichen, können wir die Diskrepanz bei unregelmäßigen Knoten leicht finden

Anmerkung 1. Die Lösung des Wärmeleitungsproblems mit einem konstanten Koeffizienten (26.1) in der Region ist unendlich oft stetig differenzierbar. Die Berücksichtigung fünfter oder mehrerer Ableitungen in der Taylor-Reihenentwicklung (26.7) wird jedoch nur Terme höherer Kleinheitsordnung zur Diskrepanz (26.8) hinzufügen  Und H, d.h. Im Wesentlichen ändert sich die Art des Residuums nicht.
Und H, d.h. Im Wesentlichen ändert sich die Art des Residuums nicht.
Anmerkung 2. Aus irgendeinem Grund sei die Lösung des ursprünglichen Problems einige Male differenzierbar; Beispielsweise hat die Lösung bei Problemen mit einem variablen Wärmeleitfähigkeitskoeffizienten, der glatt ist, aber keine zweite Ableitung aufweist, nur dritte stetige Ableitungen. Dann werden in der Taylor-Reihenentwicklung (26.7) die letzten Terme sein  nicht gerade kompensieren. Dies führt zum Auftreten eines Termes dieses Typs im Residuum (26.8).
nicht gerade kompensieren. Dies führt zum Auftreten eines Termes dieses Typs im Residuum (26.8).  diese. Die Diskrepanz wird von geringerer Größe sein als bei vierfach stetig differenzierbaren Lösungen.
diese. Die Diskrepanz wird von geringerer Größe sein als bei vierfach stetig differenzierbaren Lösungen.
Notiz 3. Nachdem Sie den Restausdruck unter Berücksichtigung der Tatsache transformiert haben, dass die Funktion darin enthalten ist u(X,T) ist eine exakte Lösung der ursprünglichen Gleichung und die Beziehungen sind dafür erfüllt

Wenn wir diesen Ausdruck in (26.8) einsetzen, erhalten wir

Wenn wir Schritte in Raum und Zeit wählen, so  dann verschwindet der führende Term des Residuums und es bleiben nur Terme höherer Kleinheitsordnung übrig
dann verschwindet der führende Term des Residuums und es bleiben nur Terme höherer Kleinheitsordnung übrig  Und H(was wir weggelassen haben). Diese Technik wird bei der Konstruktion von Differenzschemata mit erhöhter Genauigkeit verwendet.
Und H(was wir weggelassen haben). Diese Technik wird bei der Konstruktion von Differenzschemata mit erhöhter Genauigkeit verwendet.
Courant-Isakson-Ries-Schema(KIR), der manchmal auch mit dem Namen S.K. verbunden ist. Godunov, es stellt sich heraus, wenn , ![]() . Seine Näherungsordnung ist . Das KIR-Schema ist bedingt stabil, d. h. wenn die Courant-Bedingung erfüllt ist
. Seine Näherungsordnung ist . Das KIR-Schema ist bedingt stabil, d. h. wenn die Courant-Bedingung erfüllt ist ![]() . Stellen wir die Differenzengleichungen für das Courant-Isakson-Ries-Schema an internen Punkten des Rechenbereichs dar:
. Stellen wir die Differenzengleichungen für das Courant-Isakson-Ries-Schema an internen Punkten des Rechenbereichs dar:

Diese Schemata, auch Schema mit Differenzen gegen den Wind (in der englischen Literatur - gegen den Wind) genannt, können in der Form geschrieben werden
Ihr Vorteil ist eine genauere Darstellung des Abhängigkeitsbereichs der Lösung. Wenn wir die Notation einführen

dann können beide Schemata in den folgenden Formen geschrieben werden:

(Flussform der Differenzengleichung);
(hier ist der Begriff mit dem zweiten Unterschied deutlich hervorgehoben, was dem Schema Stabilität verleiht);
(Gleichung in endlichen Schritten).
Lassen Sie uns auch darüber nachdenken Methode der unsicheren Koeffizienten Um ein Differenzenschema zu konstruieren, ist die rechte Ecke der ersten Genauigkeitsordnung für die Transportgleichung erforderlich
Das Schema kann im Formular dargestellt werden
Das Courant-Isakson-Rees-Schema steht in engem Zusammenhang mit numerischen Charakteristikmethoden. Lassen Sie uns kurz die Idee solcher Methoden beschreiben.
Die letzten beiden erhaltenen Schemata (mit unterschiedlichen Vorzeichen der Übertragungsrate) können wie folgt interpretiert werden. Konstruieren wir eine Charakteristik, die durch den Knoten (t n + 1, x m) verläuft, dessen Wert bestimmt werden muss, und die Schicht t n am Punkt schneidet ![]() . Zur Bestimmtheit gehen wir davon aus, dass die Übertragungsrate c positiv ist.
. Zur Bestimmtheit gehen wir davon aus, dass die Übertragungsrate c positiv ist.
Wenn wir zeitlich eine lineare Interpolation zwischen den Knoten x m - 1 und x m auf der untersten Ebene durchführen, erhalten wir

Als nächstes übertragen wir den Wert u n (x") entlang der Kennlinie unverändert in die obere Schicht t n + 1, d.h. wir setzen ![]() . Es ist selbstverständlich, den letzten Wert als Näherungslösung zu betrachten homogene Gleichungüberweisen. In diesem Fall
. Es ist selbstverständlich, den letzten Wert als Näherungslösung zu betrachten homogene Gleichungüberweisen. In diesem Fall
oder, um von der Courant-Zahl wieder zu den Gitterparametern überzugehen,
diese. Mit einer anderen Methode gelangten wir zu dem bereits bekannten Schema der „linken Ecke“, das für stabil ist. Wenn der Schnittpunkt der den Knoten verlassenden Charakteristik (t n + 1, x m, mit der n-ten Schicht in der Zeit links vom Knoten (t n, x m - 1) liegt. Um also eine Lösung zu finden, ist es ist keine Interpolation mehr, sondern eine Extrapolation, die sich als instabil erweist.
Die Instabilität des Schemas der „rechten Ecke“ für c > 0 ist ebenfalls offensichtlich. Um dies zu beweisen, kann man entweder das Spektralmerkmal oder die Courant-, Friedrichs- und Levy-Bedingung verwenden. Ähnliche Überlegungen können für den Fall c angestellt werden< 0 и схемы "правый уголок".

Instabil Vierpunktschaltung stellt sich heraus wann ![]() , seine Näherungsordnung. Die Gittergleichungen für das Differenzenschema haben die folgende Form:
, seine Näherungsordnung. Die Gittergleichungen für das Differenzenschema haben die folgende Form:
Lax-Wendroff-Schema passiert wenn ![]() . Die Approximationsordnung des Lax-Wendroff-Schemas ist
. Die Approximationsordnung des Lax-Wendroff-Schemas ist ![]() . Das Schema ist unter der Courant-Bedingung stabil
. Das Schema ist unter der Courant-Bedingung stabil ![]() .
.
Dieses Schema kann entweder durch die Methode der unbestimmten Koeffizienten oder durch genauere Berücksichtigung des führenden Termes des Approximationsfehlers erhalten werden. Betrachten wir den Prozess der Ableitung des Lax-Wendroff-Schemas genauer. Wenn wir eine Untersuchung des vorherigen Vier-Punkte-Approximationsschemas durchführen (und die Studie ist recht elementar und läuft darauf hinaus, die Projektionsfunktion auf das Gitter der exakten Lösung des Differentialproblems in einer Taylor-Reihe zu erweitern), erhalten wir für die Hauptsache Laufzeit des Fehlers

Bei der Ableitung des Ausdrucks für den Hauptterm des Approximationsfehlers wurde eine Konsequenz der ursprünglichen Differentialtransportgleichung verwendet
![]()
Diese erhält man, indem man die ursprüngliche Gleichung (3.3) zuerst nach der Zeit t, dann nach der x-Koordinate differenziert und eine der resultierenden Beziehungen von der anderen subtrahiert.
Als nächstes ersetzen zweite Ableitung Im zweiten Term auf der rechten Seite mit einer Genauigkeit von O(h 2) erhalten wir ein neues Differenzenschema, das dem Original nahe kommt Differentialgleichung mit Präzision ![]() . Die Gittergleichungen für das Lax-Wendroff-Schema an den internen Knoten der Rechengitter lauten
. Die Gittergleichungen für das Lax-Wendroff-Schema an den internen Knoten der Rechengitter lauten
Implizites Sechs-Punkte-Schema tritt bei q = 0 auf; wenn seine Näherungsordnung ![]() , bei .
, bei .
Beispiel 1. Differenzenschema für die Poisson-Gleichung vom elliptischen Typ.
Betrachten wir die Konstruktion eines Differenzenschemas für das erste Randwertproblem der Gleichung A u = f(x,y) in einer Fläche, die ein Rechteck mit Seiten parallel zu den Koordinatenachsen ist. Dieses Rechteck soll einem einheitlichen Raster mit Stufen zugeordnet werden h x Und h y .
Grenzwertproblem
kann in Operatorform geschrieben werden:


Beachten Sie, dass dieser Eintrag auch Randbedingungen enthält.
Indem wir Differentialoperatoren durch Differenzoperatoren ersetzen, erhalten wir die Gleichungen

die die ursprüngliche Differentialgleichung zweiter Ordnung approximieren 0(h 2 + h 2) Genauigkeit und Betrieb an allen internen Punkten der Region.
Differenzanaloge von Randbedingungen haben die Form
Die Differenzennäherung der Differentialgleichung bildet zusammen mit den Differenzanalogen der Randbedingungen ein Differenzenschema für die Poisson-Gleichung.
Analog zum Randwertproblem lässt sich das Differenzenschema in Operatorform schreiben:

wobei in L/ sowohl die Differenzengleichung als auch die Differenzenrandbedingung enthalten sind:

Die Differenzengleichung setzt die Werte der Gitterfunktion an fünf bildenden Punkten in Beziehung Differenzmuster für diese Gleichung. Für diesen Fall wird dieses Muster aufgerufen kreuzen. Wir können uns andere Muster für diese Gleichung vorstellen.
Eine näherungsweise Lösung des Differentialrandwertproblems erhalten wir, wenn wir die Werte der Gitterfunktion an allen internen Knoten des Gebiets bestimmen. Dazu ist es notwendig, gemeinsam ein System algebraischer linearer Gleichungen zu lösen, dessen Dimension gleich der Anzahl der internen Knoten der Region ist. In diesem Fall sprechen wir von einem impliziten Differenzschema. Jeder Wert, der uns interessiert Uij kann nur aus der Lösung des gesamten Differenzenproblems bestimmt werden.
Bezüglich des Gleichungssystems stellen wir zwei Umstände fest.
Die betrachtete Formulierung des Differenzenproblems ist typisch für elliptische Gleichungen. In der Gasdynamik ist dies die Gleichungsform für die Strömungsfunktion bzw. für das Geschwindigkeitspotential. In anderen Abschnitten werden wir uns mit effizienten Methoden zur Lösung solcher Differenzschemata befassen.

Reis. 2.8.
PRI M 2. Differenzenschema für die einfachste parabolische Gleichung (instationäre Wärmeleitfähigkeit in einem Stab mit Einheitslänge).
Betrachten Sie das folgende Problem:

Beachten wir, dass wir im Fall einer Parabelgleichung einen offenen Bereich haben. Beim Aufbau eines Differenzenschemas ergeben sich mehrere Möglichkeiten für den Zusammenhang zwischen den Differenzenableitungen in Raum und Zeit.
Integrieren wir die Gleichung innerhalb eines Zeitschritts:

Je nachdem, mit welcher Quadraturformel wir das Integral auf der rechten Seite berechnen, erhalten wir unterschiedliche Differenzenschemata (Abb. 2.9).
Indem man die Differenzzeitableitung mit der räumlichen Ableitung in Beziehung setzt, die auf definiert ist P-te Zeitschicht erhalten wir
explizites „Differenzschema“
Dies entspricht einer näherungsweisen Berechnung des Integrals auf der rechten Seite von (2.12), jedoch unter Verwendung der Methode der linken Rechtecke.

Reis. 2.9. Raster und Vorlagen für die Wärmegleichung: A - Fläche und Raster; B- explizite Schemavorlage; V- implizite Schemavorlage; G- Vorlage einer Familie von Sechs-Punkt-Stromkreisen; D- Diagrammvorlage
„Überspringen“
Die obige Formel enthält auch eine Methode zur Lösung von Gittergleichungen:
Rasterfunktionswert auf der nächsten Zeitebene
wird durch die bekannten Werte von gf im vorherigen bestimmt. Sequentielles, schichtweises Fortbewegen vom Ausgangszustand aus ihre, 0) = y(x), Die Lösung kann im gesamten Rechenbereich gefunden werden. Das Differenzmuster für dieses Schema ist in Abb. dargestellt. 2,9, B.
Schätzen des Integrals anhand des Werts des Integranden auf der Ebene P+ 1 verwenden wir eine Differenzvorlage wie Abb. 2.9, b, und das Differenzanalogon der Differentialgleichung nimmt die Form an
Um die Werte der Gitterfunktion in der nächsten Zeitschicht zu finden, müssen bei Verwendung dieses Differenzenschemas so viele Gleichungen der Form (2.14) gemeinsam gelöst werden, wie interne Knoten vorhanden sind P - 1.-1. temporäre Schicht. Unter Berücksichtigung der Randbedingungen = / n+1, Mg Г +1 = m n+1 ermöglicht uns das System, eine Lösung auf der nächsten Zeitschicht mit bekannten Werten der Gitterfunktion auf der vorherigen zu konstruieren. Indem man von den Anfangswerten in Schichten übergeht, auf denen jeweils ein Gleichungssystem gelöst werden muss, ist es möglich, eine Näherungslösung im gesamten Bereich zu konstruieren.
Das betrachtete Differenzschema ist ein Beispiel implizites Differenzschema, Man nennt es ein Look-Ahead-Schema oder ein rein implizites Schema.
Das Sechs-Punkte-Differenzmuster erzeugt eine Familie von Differenzschemata, von denen die beiden vorherigen Sonderfälle sind:

Bei a = 0 haben wir ein explizites Schema, mit a = I- implizit mit Vorschuss, mit A> 0 – implizit. Bei A - 0,5 erhalten wir die in der Computerpraxis weithin bekannte symmetrische Gleichung Diagramm von Crank Nicholson.
Die oben genannten Schemata erschöpfen natürlich nicht die gesamte Vielfalt der Differenzenschemata, die auf der Differenzennäherung von Differentialoperatoren basieren. Hier ist ein Beispiel für ein explizites Differenzschema, das auf der Zeitableitungszentrierung basiert und eine Gitterfunktion auf drei Zeitebenen verwendet:
Das Differenzmuster erfasst drei Zeitschichten. Das Schema hat eine zweite Näherungsordnung sowohl in der Zeit als auch in der räumlichen Variablen und ist explizit. Dieses Schema weist eine Reihe erheblicher Nachteile auf, von denen die meisten durch einen Austausch beseitigt werden können Und” in der Näherung der räumlichen Ableitung durch den Mittelwert über zwei Zeitschichten:

Das so erhaltene explizite Dreischichtschema
angerufen Dufortpe-Frankel-Schema und das Fehlen eines Gitterfunktionswerts im zentralen Knoten erklärt den Namen „Leapfrog“, der manchmal für Schemata dieser Art verwendet wird.
Anhand von Beispielen wurde gezeigt, dass es für dasselbe Randwertproblem möglich ist, mehrere unterschiedliche Differenzenschemata zu schreiben, d. h. Dem Forscher steht eine recht große Auswahl zur Verfügung. Welche Bedingungen muss das Differenzenschema erfüllen, damit die Differenzenlösung der Lösung des ursprünglichen Differentialproblems entspricht? Dieses Problem wird im nächsten Abschnitt behandelt.
Unter Verwendung einer Vorlage für jeden internen Knoten des Lösungsbereichs wird die Wärmeleitungsgleichung angenähert
![]()
![]()
![]()

![]()
Von hier aus finden wir:
![]()
Unter Verwendung der Anfangs- und Randbedingungen werden die Werte der Gitterfunktion an allen Knoten auf der Nullzeitebene gefunden.
Dann verwenden Sie die Beziehungen
![]()
Die Werte dieser Funktionen finden sich in allen internen Knoten auf der ersten Zeitebene, danach finden wir den Wert an den Randknoten
Als Ergebnis ermitteln wir den Wert der Merkmale in allen Knoten auf der ersten Zeitebene. Danach finden wir mithilfe dieser Beziehungen alle anderen Werte usw.
Im betrachteten Differenzenschema wird der Wert der gewünschten Funktion auf der nächsten Zeitebene direkt ermittelt, explizit anhand der Formel
![]()
Daher wird das betrachtete Differenzschema, das dieses Muster verwendet, aufgerufen explizites Differenzschema . Seine Genauigkeit liegt in der Größenordnung.
Dieses Differenzschema ist einfach anzuwenden, weist jedoch einen erheblichen Nachteil auf. Es stellt sich heraus, dass das explizite Differenzschema hat eine stabile Lösung nur für den Fall, dass wenn die Bedingung erfüllt ist :
Explizites Differenzschema ist bedingt stabil . Ist die Bedingung nicht erfüllt, führen kleine Rechenfehler, beispielsweise beim Runden von Computerdaten, zu einer starken Änderung der Lösung. Die Lösung wird unbrauchbar. Diese Bedingung führt zu sehr strengen Einschränkungen des Zeitschritts, die aufgrund einer erheblichen Erhöhung der Rechenzeit zur Lösung dieses Problems möglicherweise nicht akzeptabel sind.
Betrachten Sie ein Differenzschema mit einem anderen Muster
Methode 36
Implizites Differenzenschema für die Wärmegleichung.

![]()
![]()
Setzen wir in die Wärmeleitfähigkeitsgleichung ein:
![]()
![]()
Diese Relation wird für jeden internen Knoten auf Zeitebene geschrieben und durch zwei Relationen ergänzt, die die Werte an den Randknoten bestimmen. Das Ergebnis ist ein Gleichungssystem zur Bestimmung der unbekannten Werte der Funktion auf der Zeitebene.
Das Schema zur Lösung des Problems ist wie folgt:
Unter Verwendung der Anfangs- und Randbedingungen wird der Wert der Funktion auf der Nullzeitebene ermittelt. Anschließend wird unter Verwendung dieser Beziehungen und Randbedingungen ein System linearer algebraischer Gleichungen erstellt, um den Wert der Funktion auf der ersten Zeitebene zu ermitteln. Anschließend wird das System erneut unter Verwendung dieser Beziehungen erstellt und die Werte ermittelt auf der zweiten Zeitebene usw.
Unterschied zum expliziten Schema- Werte auf der nächsten Zeitebene werden nicht direkt anhand einer vorgefertigten Formel berechnet, sondern durch Lösen eines Gleichungssystems ermittelt, d.h. Die Werte der Unbekannten werden implizit durch Lösen des SLAE ermittelt. Daher wird das Differenzschema als implizit bezeichnet. Im Gegensatz zu explizit ist implizit absolut stabil.
Thema Nr. 9
Optimierungsprobleme.
Diese Probleme gehören zu den wichtigsten Problemen der angewandten Mathematik. Optimierung bedeutet Auswahl der besten Option aus allen möglichen Lösungen für ein bestimmtes Problem. Dazu ist es notwendig, das zu lösende Problem mathematisch zu formulieren und den Konzepten von besser oder schlechter eine quantitative Bedeutung zu geben. Typischerweise ist es während des Lösungsprozesses notwendig, die optimierten Parameterwerte zu finden. Diese Parameter werden aufgerufen Design Und die Anzahl der Designparameter bestimmt Dimension des Problems.
Eine quantitative Bewertung der Lösung erfolgt anhand einer bestimmten Funktion in Abhängigkeit von den Entwurfsparametern. Diese Funktion wird aufgerufen Ziel . Es ist so aufgebaut, dass der optimalste Wert dem Maximum (Minimum) entspricht.
![]() - Zielfunktion.
- Zielfunktion.
Die einfachsten Fälle liegen vor, wenn die Zielfunktion von einem Parameter abhängt und durch eine explizite Formel angegeben wird. Es kann mehrere Zielfunktionen geben.
Beispielsweise ist es bei der Konstruktion eines Flugzeugs notwendig, gleichzeitig maximale Zuverlässigkeit, minimales Gewicht und minimale Kosten usw. sicherzustellen. Geben Sie in solchen Fällen ein Prioritätssystem . Jeder Zielfunktion wird ein bestimmter Zielmultiplikator zugeordnet, wodurch eine verallgemeinerte Zielfunktion (Kompromissfunktion) entsteht.
Normalerweise wird die optimale Lösung durch eine Reihe von Bedingungen begrenzt, die mit der physikalischen Funktion des Problems zusammenhängen. Diese Bedingungen können in Form von Gleichheiten oder Ungleichheiten vorliegen

Theorie und Methoden zur Lösung von Optimierungsproblemen bei Vorliegen von Restriktionen sind Gegenstand der Forschung in einem der Zweige der angewandten Mathematik – mathematische Programmierung.
Wenn die Zielfunktion in Bezug auf die Entwurfsparameter linear ist und die den Parametern auferlegten Einschränkungen ebenfalls linear sind, dann Problem der linearen Programmierung . Betrachten wir Methoden zur Lösung eines eindimensionalen Optimierungsproblems.
Es ist erforderlich, die Werte zu finden, bei denen die Zielfunktion einen Maximalwert hat. Wenn die Zielfunktion analytisch angegeben wird und ein Ausdruck für ihre Ableitungen gefunden werden kann, wird die optimale Lösung entweder an den Enden des Segments oder an den Punkten erreicht, an denen die Ableitung verschwindet. Das sind die kritischen Punkte und . Es ist notwendig, die Werte der Zielfunktion an allen kritischen Punkten zu finden und den maximalen auszuwählen.
Im Allgemeinen werden verschiedene Suchmethoden verwendet, um eine Lösung zu finden. Dadurch verengt sich das Segment, das die optimale Lösung enthält.
Schauen wir uns einige der Suchmethoden an. Nehmen wir an, dass die Zielfunktion auf dem Intervall ein Maximum hat. In diesem Fall wird durch Division mit Knotenpunkten, deren Anzahl ist, die Zielfunktion an diesen Knotenpunkten berechnet. Nehmen wir an, dass der Maximalwert der Zielfunktion am Knoten liegt, dann können wir davon ausgehen, dass die optimale Lösung im Intervall liegt. Dadurch wurde das Segment mit der optimalen Lösung eingegrenzt. Das resultierende neue Segment wird erneut in Teile unterteilt usw. Mit jeder Partitionierung wird das Segment, das die optimale Lösung enthält, um einen Faktor reduziert.
Nehmen wir an, dass Verengungsschritte durchgeführt wurden. Dann wird das ursprüngliche Segment um einen Faktor reduziert.
Das heißt, wir machen es, während es läuft (*)
In diesem Fall wird die Zielfunktion berechnet.
Es ist erforderlich, einen Wert zu finden, bei dem der Ausdruck (*) im kleinsten Fall erhalten wird
Anzahl der Berechnungen.
Methode 37
Halbteilungsmethode.
Betrachten wir die Suchmethode für . Man spricht von der Halbierungsmethode, da bei jedem Schritt das Segment, das die optimale Lösung enthält, halbiert wird.

Durch gezielte Auswahl der Punkte, an denen die Zielfunktion bei einem bestimmten Einengungsschritt berechnet wird, lässt sich die Effizienz der Suche steigern.
Methode 38
Methode des Goldenen Schnitts.
Ein effektiver Weg ist die Methode des Goldenen Schnitts. Der Goldene Schnitt eines Segments ist der Punkt, für den die Bedingung erfüllt ist
Es gibt zwei solcher Punkte: =0,382 +0,618
0,618 +0,382 .
Das Segment wird durch Punkte geteilt und dann wird ein Punkt gefunden, an dem die Zielfunktion maximal ist. Als Ergebnis wird ein modifiziertes Segment mit einer Länge von 0,618( - ) gefunden.
Ein Wert des Goldenen Schnitts für das verengte Segment ist bereits bekannt, daher ist es bei jedem weiteren Schritt erforderlich, die Zielfunktion nur an einem Punkt (dem zweiten Punkt des Goldenen Schnitts) zu berechnen.
Methode 39
Methode des Koordinaten-für-Koordinaten-Aufstiegs (Abstiegs).
Kommen wir nun zur Betrachtung des Optimierungsproblems für den Fall, dass die Zielfunktion von mehreren Parameterwerten abhängt. Die einfachste Suchmethode ist die Methode des Koordinaten-für-Koordinaten-Aufstiegs (Abstiegs).
Mathematik und mathematische Analyse
Die Lösung des Differenzenschemas wird als Näherungslösung des Differentialproblems bezeichnet. Eigenschaften des impliziten Differenzenschemas Betrachten Sie eine eindimensionale Differentialgleichung parabolischen Typs mit Anfangs- und Randbedingungen: 4.7 wird im n-ten Zeitschritt geschrieben, um die anschließende Darstellung der Methode und des Algorithmus zur Lösung des impliziten Differenzenschemas 4 zu erleichtern Im Abschnitt Die Reihenfolge der Approximation des Differenzschemas wurde darauf hingewiesen, dass das Differenzschema 4.
Frage 8: Differenzschemata: explizite und implizite Schemata:
Differenzschema
Dabei handelt es sich um ein endliches System algebraischer Gleichungen, das einem Differentialproblem zugeordnet wirdDifferentialgleichungund zusätzliche Bedingungen (z.BRandbedingungen und/oder Anfangsverteilung). Somit werden Differenzenschemata verwendet, um ein Differentialproblem, das kontinuierlicher Natur ist, auf ein endliches Gleichungssystem zu reduzieren, dessen numerische Lösung prinzipiell auf Computern möglich ist. Algebraische Gleichungen in Korrespondenz bringenDifferentialgleichungwerden durch Bewerbung erlangtDifferenzmethode, was die Theorie der Differenzschemata von anderen unterscheidetnumerische MethodenLösen differenzieller Probleme (zum Beispiel Projektionsmethoden, wie z Galerkin-Methode).Die Lösung des Differenzenschemas wird als Näherungslösung des Differentialproblems bezeichnet.
Merkmale des Impliziten Differenzschema
Betrachten Sie eine Eindimensionalität Differentialgleichungparabolischer Typ Mit :
|
(4.5) |
Schreiben wir für die Gleichung (4.5) implizites Differenzschema:
|
(4.6) |
Lass uns schreiben:
|
(4.7) |
Die Näherung der Randbedingungen (4.7) wird geschrieben als ( n Methode und Algorithmus Lösungen für das implizite Differenzenschema (4.6).
Im Kapitel "„Es wurde festgestellt, dass das Differenzschema (4.6) dasselbe hatReihenfolge der Annäherungsowie das entsprechende explizite Differenzschema(4.2), nämlich:
Im Kapitel " Beweis der absoluten Stabilität des impliziten Differenzenschemas„Es wurde bewiesen, dass das implizite Differenzenschema (4.6) absolut stabil ist, d. h. unabhängig von der Wahl des Divisionsintervalls durch.“Differenzraster(oder mit anderen Worten: Auswahl eines Berechnungsschritts basierend auf unabhängigen Variablen)LösungsfehlerDas implizite Differenzschema wird während des Berechnungsprozesses nicht vergrößert. Beachten Sie, dass dies sicherlich ein Vorteil des impliziten Differenzschemas (4.6) gegenüber dem expliziten Differenzschema ist(4.2) , die nur dann stabil ist, wenn die Bedingung erfüllt ist(3.12) . Gleichzeitig ist das explizite Differenzschema recht einfach Lösungsmethode , und die Methode zur Lösung des impliziten Differenzenschemas (4.6), genanntSweep-Methode, komplexer. Bevor du gehstzur Vorstellung der Sweep-Methode, notwendig eine Reihe von Beziehungen ableiten, von dieser Methode verwendet.
Merkmale von explizit Differenzschema.
Betrachten Sie eine Eindimensionalität Differentialgleichungparabolischer Typ Mit Anfangs- und Randbedingungen:
|
(4.1) |
Schreiben wir für die Gleichung(4.1) explizites Differenzschema:
|
(4.2) |
Schreiben wir es auf Annäherung der Anfangs- und Randbedingungen:
|
(4.3) |
Die Näherung der Randbedingungen (4.3) wird geschrieben als ( N + 1)ter Zeitschritt zur Vereinfachung der späteren Präsentation Methode und Algorithmus Lösungen für das explizite Differenzenschema (4.2).
Im Kapitel "Die Reihenfolge der Approximation des Differenzschemas„Es wurde bewiesen, dass das Differenzschema (4.2) giltReihenfolge der Annäherung:
Im Kapitel " Beweis der bedingten Stabilität eines expliziten Differenzschemas„Bedingung wurde erhalten Nachhaltigkeit gegebenes Differenzschema, das bei der Erstellung Einschränkungen bei der Wahl des Teilungsintervalls auferlegtDifferenzraster(oder mit anderen Worten eine Einschränkung der Wahl des Berechnungsschritts für eine der unabhängigen Variablen):
Beachten Sie, dass dies natürlich ein Nachteil des expliziten Differenzschemas (4.2) ist. Gleichzeitig ist es ziemlich einfach Lösungsmethode.
Sowie andere Werke, die Sie interessieren könnten |
|||
| 6399. | Bewusstsein als Problem der Philosophie | 58 KB | |
| Bewusstsein als Problem der Philosophie Grundlegende philosophische Positionen zum Problem des Bewusstseins Theorie der Reflexion. Grundlegende philosophische Positionen zum Problem des Bewusstseins. Vertreter des objektiven Idealismus (Platon, Hegel) interpretieren Bewusstsein, Geist als ewiges... | |||
| 6400. | Dialektik als theoretisches System und Erkenntnismethode | 98,5 KB | |
| Dialektik als theoretisches System und Erkenntnismethode Historische Typen der Metaphysik und Dialektik Systematik Determinismus Entwicklung Historische Typen der Metaphysik und Dialektik Seit der Antike ist den Menschen aufgefallen, dass alle Objekte und Phänomene... | |||
| 6401. | Das Problem des Menschen in der Philosophie | 71 KB | |
| Das Problem des Menschen in der Philosophie Das Problem des Menschen in der Geschichte der Philosophie Das Problem der Anthroposoziogenese Die menschliche Natur Das Problem des Menschen ist von zentraler Bedeutung für die gesamte spirituelle Kultur der Gesellschaft, weil Nur durch uns selbst verstehen wir die Welt um uns herum, oh... | |||
| 6402. | Menschliche Aktivität und ihr Inhalt | 116 KB | |
| Menschliches Handeln und seine inhaltliche Entwicklung und Entfremdung. Das Problem der Freiheit. Grundlegende Wege der menschlichen Erforschung der Welt. Erkenntnis. Praktisch-spirituelle Beherrschung der Welt. Beherrschung und Entfremdung. Das Problem der Freiheit. Das zentrale Problem... | |||
| 6403. | Gesellschaft als Gegenstand philosophischer Analyse | 71 KB | |
| Gesellschaft als Gegenstand philosophischer Analyse. Sozialphilosophie und ihre Aufgaben. Grundlegende philosophische Ansätze zum Verständnis der Gesellschaft. Struktur der Gesellschaft Sozialphilosophie und ihre Aufgaben. Im gewöhnlichen Bewusstsein gibt es eine Illusion von direktem... | |||
| 6404. | Geschichtsphilosophie. Triebkräfte und Themen des historischen Prozesses | 66 KB | |
| Geschichtsphilosophie Gegenstand und Aufgaben der Geschichtsphilosophie Periodisierung der Gesellschaftsgeschichte Triebkräfte und Gegenstände des historischen Prozesses Gegenstand und Aufgaben der Geschichtsphilosophie Für einen Historiker ist die Vergangenheit eine Gegebenheit außerhalb... | |||
| 6405. | Stile der aktuellen ukrainischen Literatursprache in der Fachliteratur | 44,27 KB | |
| Stile der aktuellen ukrainischen Literatursprache im professionellen Kompositionsplan. Funktionale Stile der ukrainischen Sprache und der Bereich ihrer Stagnation. Grundmerkmale funktionaler Stile. Text als Form der Umsetzung multiprofessioneller Aktivitäten (Kommunikation...) | |||
| 6406. | Grundbegriffe der Soziolinguistik | 121 KB | |
| Grundbegriffe der Soziolinguistik Movna spilnota. Sprachcode, Subcode. Mischen und Mischen von Codes. Interferenz-Movna-Variabilität. Es ist normal. Soziolekt. Sphere vikoristannya Film. Zweisprachigkeit. Di... | |||
| 6407. | Rechtlich wird es durch arbeitsrechtliche Normen geregelt | 101 KB | |
| Rechtsbegriffe, die durch das Arbeitsrecht geregelt werden Das Konzept der arbeitsrechtlichen Begriffe Rechtsbegriffe in der Ehe werden durch die Existenz gesetzlicher Regelungen gebildet und entwickelt, die vom Staat zur Regelung des Arbeitsrechts erlassen werden. Ich werde aufstehen... | |||

Bitte übergeben Sie dieses Manuskript dem Herausgeber – ein einleitendes Wort („Ich bitte Sie“); Bitte sag mir, wie mutig er ist! - ganz...
Das Cosmos-Projekt wird von Schülern der Klassen 2, 3, 4 und sogar 5 durchgeführt. Kinder erweitern ihr Wissen über den Weltraum, seine Geheimnisse, Astronauten,...
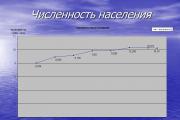
Studienleistungen in der Disziplin „Sozioökonomische Geographie des Auslands“ „Sozioökonomische Entwicklung...“
Definition Zwischen allen Körpern, die Massen haben, wirken Kräfte, die die oben genannten Körper zueinander anziehen...

Gefühl ist. Gefühl in der Psychologie. Funktionen und Arten von Empfindungen Die Empfindung ist eine der einfachsten und zugleich...

Lehrerin: Serebryakova Tatyana Alekseevna Zentrales Bildungszentrum Erstes europäisches Gymnasium von Peter dem Großen Technologische Karte des Unterrichts...
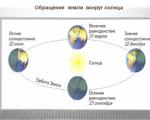
Schon in der Antike interessierten sich die Menschen dafür, warum die Nacht in den Tag übergeht, der Winter in den Frühling und der Sommer in den Herbst. Später, wenn...

„Geschichte unseres Heimatlandes“, gewidmet dem 100. Jahrestag der Revolution von 1917 in RusslandVorwort Zum Beginn des 20. Jahrhunderts in...

Welche Geräusche machen Hasen? Kratzen, Rascheln, Grunzen =)) Und wenn er wächst, brüllt er! Diese sind...
Der alte Mann und die alte Frau sind gesprächig. Märchen!! .... Es waren einmal ein alter Mann und eine alte Frau. Die alte Frau konnte nicht sprechen...

Zurück Vor Achtung! Folienvorschauen dienen nur zu Informationszwecken...

AUFGABE 19. SPUNKZEICHEN IN EINEM KOMPLEXEN SATZ MIT VERSCHIEDENEN VERBINDUNGSARTEN Aufgabenwortlaut: Ort...
Ein Umstand ist ein untergeordnetes Mitglied eines Satzes, der ein Zeichen einer Handlung oder ein anderes Zeichen bezeichnet....
Seine Biografie und sein Werk offenbaren die Persönlichkeit eines Rebellen, eines Menschen, der sich nicht in einer Zeit allgemeiner Gesetzlosigkeit sieht ...
Das Cosmos-Projekt wird von Schülern der Klassen 2, 3, 4 und sogar 5 durchgeführt. Kinder erweitern ihr Wissen über den Weltraum, seine Geheimnisse,...
Studienleistungen in der Disziplin „Sozioökonomische Geographie des Auslands“...