Teoretický materiál Konečně můžete požádat o radu odborníka
Předejte, prosím, tento rukopis redakci - úvodní slovo („Ptám se vás“); Prosím, řekněte mi, jak je statečný! - Celý...
Tato věta stanoví kvantitativní vztah mezi prací síly (příčinou) a kinetickou energií hmotného bodu (účinek).
Kinetická energie hmotného bodu je skalární veličina rovna polovině součinu hmotnosti bodu a druhé mocniny jeho rychlosti
 .
(43)
.
(43)
Kinetická energie charakterizuje mechanické působení síly, kterou lze přeměnit na jiné druhy energie, například tepelnou.
Práce síly při daném posunutí je charakteristika působení síly, která vede ke změně modulu rychlosti.
Elementární práce síly je definován jako skalární součin vektoru síly a vektoru elementárního posunutí v místě jeho působení

 ,
(44)
,
(44)
Kde  - elementární pohyb.
- elementární pohyb.
Modul elementární práce je určen vzorcem
Kde
- úhel mezi vektorem síly a vektorem elementárního posunutí;  - projekce vektoru síly na tečnu.
- projekce vektoru síly na tečnu.
Celková práce na nějakém konečném posunutí je určena integrálem
 .
(46)
.
(46)
Z (46) vyplývá, že celkovou práci lze vypočítat ve dvou případech, kdy je síla konstantní nebo závisí na posuvu.
Na F=konst dostaneme  .
.
Při řešení problémů je často vhodné použít analytickou metodu výpočtu síly
Kde F X , F y , F z– projekce síly na souřadnicové osy.
Dokažme následující větu.
Teorém: Změna kinetické energie hmotného bodu při určitém jeho posunutí se rovná práci síly působící na bod při stejném posunutí.
Nechť hmotný bod M o hmotnosti m se pohybuje pod vlivem síly F z pozice M0 do pozice M1.
OUD:  .
(47)
.
(47)
Pojďme si představit substituci  a promítněte (47) na tečnu
a promítněte (47) na tečnu
 .
(48)
.
(48)
Proměnné v (48) oddělíme a integrujeme

V důsledku toho dostáváme
 .
(49)
.
(49)
Rovnice (49) dokazuje výše formulovanou větu.
Větu je vhodné použít, když zadané a hledané parametry zahrnují hmotnost bodu, jeho počáteční a konečnou rychlost, síly a posunutí.
1. Práce gravitace se vypočítá jako součin modulu síly a svislého posunutí bodu jeho působení
 .
(50)
.
(50)
Při pohybu nahoru je práce pozitivní, při pohybu dolů je práce negativní.
2. Práce pružné síly pružiny F=-cx rovná
 ,
(51)
,
(51)
Kde X 0 – počáteční protažení (stlačení) pružiny;
X 1 – konečné prodloužení (stlačení) pružiny.
Práce gravitace a pružné síly nezávisí na trajektorii pohybu jejich bodů působení. Takové síly, jejichž práce nezávisí na dráze, se nazývají potenciální síly.
3. Práce třecí síly.
Protože třecí síla směřuje vždy ve směru opačném ke směru pohybu, je její práce rovna
Práce vykonaná třecí silou je vždy záporná. Síly, jejichž práce je vždy negativní, jsou volány disipativní.
Věta dokázaná v § 89 platí pro jakýkoli bod soustavy. Pokud tedy uvažujeme jakýkoli bod systému s hmotností a rychlostí, pak pro tento bod to bude
kde jsou elementární díla vnějších a vnitřních sil působících na bod. Zjistíme, že sestavením takových rovnic pro každý z bodů systému a jejich přidáním po členu
Rovnost (49) vyjadřuje větu o změně kinetické energie systému v diferenciálním tvaru. Integrací obou stran této rovnosti v mezích odpovídajících pohybu systému z nějaké počáteční polohy, kde je kinetická energie rovna poloze, kde se hodnota kinetické energie rovná, získáme
Tato rovnice vyjadřuje větu o změně kinetické energie v jiném (integrálním) tvaru: změna kinetické energie systému při nějakém pohybu je rovna součtu práce vykonané na tomto pohybu všech vnějších a vnitřních sil působících na systém.
Na rozdíl od předchozích teorémů nejsou vyloučeny vnitřní síly v rovnicích (49) nebo (50). Ve skutečnosti, pokud jsou interakční síly mezi body systému (obr. 309), pak

Ale v tomto případě se bod může pohybovat ve směru a bod se může pohybovat ve směru od. Práce každé ze sil pak bude kladná a součet práce nebude nulový. Například při výstřelu (viz Problém 127 v § 112) působí tlakové síly práškových plynů, které jsou vnitřní pro systém částí zpětného rázu střely, a udělují rychlost tělesům systému.
Uvažujme dva důležité speciální případy.
1. Neměnný systém. Mechanický systém budeme nazývat neměnným, ve kterém vzdálenost mezi každým dvěma interagujícími body zůstává konstantní po celou dobu pohybu.
Uvažujme dva body neměnné soustavy působící na sebe silami (viz obr. 309). Potom, od kdy se segment pohybuje, by měly být (viz § 55), potom a od - v tomto pořadí, rychlosti a elementární posuny bodů navíc, . Výsledkem je, že pro součet elementárních prací těchto sil získáme
Totéž se stane pro všechny ostatní interagující body systému. V důsledku toho dojdeme k závěru, že v případě neměnného systému je součet práce všech vnitřních sil roven nule a rovnice (49) nebo (50) mají tvar
2. Systém s ideálními spoji. Uvažujme systém, kterému jsou uložena spojení, která se v čase nemění. Rozdělme všechny vnější a vnitřní síly působící na body soustavy na aktivní a reakční vazby. Potom lze rovnici (49) znázornit jako
kde je elementární práce vnějších a vnitřních aktivních sil působících na bod v systému a je elementární práce reakcí působících na stejný bod vnějších a vnitřních spojení.
Jak vidíme, změna kinetické energie systému závisí na práci a činných silách a reakcích vazeb. Je však možné zavést koncept takových „ideálních“ mechanických systémů, ve kterých přítomnost spojení neovlivňuje změnu kinetické energie systému při jeho pohybu. Pro taková spojení musí být samozřejmě splněna podmínka
Pokud je pro spoje, které se nemění s časem, součet práce všech reakcí při elementárním posunutí soustavy roven nule, pak jsou takováto spojení ideální.
V § 89 bylo stanoveno, že je-li spojnicí nehybná plocha (nebo křivka), o které lze tření zanedbat, pak při klouzání těles po takové ploše (křivce) je reakční práce N rovna nule. Pak v § 122 je ukázáno, že pokud zanedbáme deformace, tak když se těleso odvaluje, aniž by klouzalo po drsném povrchu, je práce normálové reakce N a třecí síly (tedy tečné složky reakce) rovna nule. . Dále, reakční práce R závěsu (viz obr. 10 a 11), pokud zanedbáme tření, bude také rovna nule, protože bod působení síly R zůstává stacionární pro jakýkoli pohyb systému. Konečně, pokud na Obr. 309 považujte hmotné body za spojené tuhou (neroztažnou) tyčí, pak síly budou reakcemi tyče; práce každé z těchto reakcí při pohybu soustavy není rovna nule, ale součet těchto prací, jak bylo prokázáno, dává nulu. Všechna výše uvedená spojení lze tedy s přihlédnutím k učiněným výhradám považovat za ideální.
Pro mechanický systém, kterému jsou uložena pouze ideální spojení, která se v průběhu času nemění, bude existovat
Změna kinetické energie systému s ideálními vazbami, které se v čase nemění při žádném jeho pohybu, se tedy rovná součtu práce na tomto pohybu vnějších a vnitřních činných sil působících na systém.
Všechny předchozí věty umožňovaly vyloučit z pohybových rovnic vnitřní síly, ale všechny vnější síly včetně dříve neznámých reakcí vnějších souvislostí byly v rovnicích zachovány. Praktická hodnota věty o změně kinetické energie spočívá v tom, že při neměnných ideálních spojeních v čase umožňuje vyloučit z pohybových rovnic všechny dříve neznámé reakce spojení.

mechanický systém
Kinetická energie mechanické soustavy je aritmetický součet kinetických energií všech jeho hmotných bodů
Výpočet kinetické energie pevné látky
1. Pohyb vpřed
Jak je známo, při translačním pohybu jsou rychlosti všech bodů tělesa ve stejném časovém okamžiku stejné, pak (83) lze znázornit ve tvaru
 .
(84)
.
(84)
Když se těleso pohybuje vpřed, jeho kinetická energie se rovná polovině součinu hmotnosti a druhé mocniny rychlosti těžiště.
2. Rotační pohyb tuhého tělesa
P  Při rotačním pohybu rychlost každého bodu tělesa
Při rotačním pohybu rychlost každého bodu tělesa
 .
(85)
.
(85)
Dosadíme (85) za (83):
 .
.
Vezmeme-li v úvahu (59), dostáváme
 .
(86)
.
(86)
Při rotačním pohybu je kinetická energie rovna polovině součinu momentu setrvačnosti tělesa vůči ose otáčení a druhé mocnině úhlové rychlosti.
3 . Plochý pohyb
Rovinný pohyb může být reprezentován jako rotace vzhledem k pólu (například těžiště) a pohyb společně s pólem, pak
 .
(87)
.
(87)
Kinetická energie tělesa v rovinném pohybu je rovna součtu kinetických energií z translačního pohybu spolu s těžištěm a rotačním pohybem vzhledem k těžišti.
Teorém: Změna kinetické energie mechanického systému při určitém posunutí se rovná součtu práce, kterou vykonaly všechny vnitřní a vnější síly systému při stejném posunutí.
 .
(88)
.
(88)
Poznámky:
1. Zavedená hodnota kinetické energie soustavy je na rozdíl od hybnosti soustavy a kinetického momentu skalární veličina. kde:
Q=0 pro rotační pohyb a klid;
K Ó=0 během translačního pohybu nebo v klidu;
T
Na rozdíl od věty o změně hybnosti a momentu hybnosti je tedy tato věta vhodná pro studium jakéhokoli typu pohybu, protože T=0 pouze pro stacionární systém.
2. Na rozdíl od zmíněných vět tato věta zohledňuje působení vnitřních sil soustavy.
1. Práce momentu sílyM Z vzhledem k ose se rovná součinu momentu a úhlu natočení těleso vzhledem k ose
 .
(89)
.
(89)
2. Součet práce vnitřních sil absolutně tuhého tělesa (nedeformovatelného) je vždy nula.
3.
Práce s valivým třecím momentem .
.
 ,
,
Kde - koeficient valivého tření;
R– poloměr válce;
s– délka oblouku rovna segmentu dráhy, kterou urazí těžiště C podél povrchu;
 - úhel natočení os válců při pohybu;
- úhel natočení os válců při pohybu;
N– normální povrchová reakce;
P- gravitace;
F tr– kluzná třecí síla.
1. Pohyb vpřed
Při translačním pohybu se všechny body tělesa pohybují po stejných trajektoriích a ve stejném časovém okamžiku mají stejná zrychlení. K popisu pohybu pak můžeme použít větu o pohybu těžiště (67). Tuto rovnici promítneme na souřadnicové osy
Soustava (90) představuje diferenciální rovnice translačního pohybu tuhého tělesa.
2. Rotační pohyb
P  Tuhé těleso se vlivem sil otáčí kolem osy. Dynamickou charakteristikou rotačního pohybu tuhého tělesa je kinetický moment K z a charakteristikou rotačního působení síly je moment síly vzhledem k ose. Proto k popisu rotačního pohybu tuhého tělesa vzhledem k pevné ose použijeme větu o změně kinetické hybnosti (81)
Tuhé těleso se vlivem sil otáčí kolem osy. Dynamickou charakteristikou rotačního pohybu tuhého tělesa je kinetický moment K z a charakteristikou rotačního působení síly je moment síly vzhledem k ose. Proto k popisu rotačního pohybu tuhého tělesa vzhledem k pevné ose použijeme větu o změně kinetické hybnosti (81)
 .
(91)
.
(91)
Při rotačním pohybu  , Pak
, Pak
 ,
,
vezmeme-li v úvahu, že já z=konst, nakonec dostaneme
 .
(92)
.
(92)
Rovnice (92) je diferenciální rovnice pro rotační pohyb tuhého tělesa kolem pevné osy.
Nalezený úhel kdykoli určí polohu těla vykonávajícího rotační pohyb.
3. Plochý pohyb
Poloha tělesa vykonávajícího v libovolném okamžiku rovinný pohyb je určena polohou tyče a úhlem natočení tělesa vůči tyči. Vezmeme-li jako pól těžiště tělesa, pak rovnici jeho pohybu zjistíme pomocí věty o pohybu těžiště (67) a rotační pohyb vzhledem ke středu bude určen pomocí rovnice (92), která platí i pro pohyb soustavy vzhledem k ose procházející těžištěm. Pak mají diferenciální rovnice rovinného pohybu tuhého tělesa tvar
2.4.1. Kinetická energie mechanické soustavy. Kinetická energie hmotného bodu pohybujícího se rychlostí se nazývá veličina
Kinetická energie mechanického systému je součtem kinetických energií hmotných bodů obsažených v tomto systému:
V případech, kdy je hmota soustavy rozložena spojitě, je sumace ve výrazu (7) nahrazena integrací přes distribuční plochu.
Vztah mezi hodnotami kinetické energie mechanického systému ve dvou vztažných systémech, z nichž jeden je stacionární a druhý se pohybuje translačně rychlostí , kde bod C je těžištěm mechanického systému, je dán vztahem Koenigova věta:
![]() . (8)
. (8)
Tady ![]() - kinetická energie mechanické soustavy v pohyblivé soustavě souřadnic.
- kinetická energie mechanické soustavy v pohyblivé soustavě souřadnic.
Pomocí výrazů (6, 7, 8) můžete psát vzorce pro výpočet kinetické energie pevného tělesa:
Když se hmotné těleso pohybuje vpřed rychlostí
Při otáčení úhlovou rychlostí kolem pevné osy tělesa s momentem setrvačnosti
při planparalelním pohybu tuhého tělesa s úhlovou rychlostí při hodnotě centrálního momentu setrvačnosti vzhledem k ose kolmé k rovině pohybu a hodnotě momentu setrvačnosti vzhledem k okamžité ose rotace
![]() . (11)
. (11)
2.4.2. Energetické charakteristiky. Energetické charakteristiky síly zahrnují její sílu, práci a potenciální energii.
Napájení síla, jejíž působiště se pohybuje rychlostí, se nazývá velikost
Práce síla na elementárním intervalučas a elementární posunutí bodu aplikace odpovídající tomuto časovému období je určeno pravidlem
Práce síla na konečném intervalučas a odpovídající změna poloměru - vektoru bodu působení této síly od do - se nazývá vel.
 . (14)
. (14)
Práce vykonaná momentem dvojice sil se vypočítá podobným způsobem.
Potenciální energie je definována pouze v případech, kdy výraz (13) je totální diferenciál:
Když je splněna podmínka (15), síla je považována za potenciální. Vztahy spojující průměty síly na osu zvoleného souřadného systému s funkcí:
Pokud se bod působení síly posunul z polohy do polohy , pak integrací (15) můžeme získat
 . (17)
. (17)
Poznámka: potenciální energie je určena až do konstantního členu; Uvedená vlastnost nám umožňuje předpokládat, že potenciální energie je rovna nule v bodě, který si zvolíme (například v počátku souřadnic).
V případě, že pro množinu sil působících na mechanickou soustavu lze zapsat výraz pro potenciální energii, mechanická soustava se nazývá konzervativní. Takové mechanické systémy mají důležité vlastnosti - práce působících sil nezávisí na typu trajektorie a zákonu pohybu podél ní; práce při pohybu po uzavřené smyčce je nulová.
Podmínky, za kterých funkce existuje:
2.4.3. Věta o změně kinetické energie. Zápis věty o změně kinetické energie mechanického systému v diferenciálním tvaru:
Časová derivace kinetické energie mechanického systému je rovna síle vnějších a vnitřních sil.
Integrální forma zápisu věty o změně kinetické energie
![]() , (20)
, (20)
Kde ; ; ; .
V konkrétním případě, kdy výraz pro potenciální energii lze napsat pro souhrn vnějších a vnitřních sil systému, je zákon zachování celkové mechanické energie splněn.
a samotný systém se ukazuje jako konzervativní.
PŘÍKLAD 3. Pro mechanický systém znázorněný na obr. 2 získejte diferenciální rovnici pro pohyb zátěže.
ŘEŠENÍ. Použijme větu o změně kinetické energie v diferenciálním tvaru (19). Duševně se osvoboďme od souvislostí aplikací vhodných reakcí na těla mechanické soustavy (viz obr. 2). Poznámka: Síly působící na stacionární těžiště koaxiálního bloku nejsou znázorněny, protože jejich síla je nulová.

Vytvořme výraz pro kinetickou energii mechanického systému.
Kinetická energie mechanického systému je součtem kinetických energií všech jeho hmotných bodů:
Pojďme vypočítat diferenciál z vyjádření kinetické energie a provést několik jednoduchých transformací:

Vynecháme-li mezihodnoty a použijeme dříve uvedený symbol k označení elementární práce, píšeme:

Diferenciál kinetické energie mechanického systému je tedy roven součtu elementárních prací všech vnějších a vnitřních sil působících na body systému. To je obsah věty o změně kinetické energie.
Všimněte si, že součet práce vykonané vnitřními silami systému není v obecném případě roven nule. Vymizí pouze v některých speciálních případech: když je systém absolutně tuhé tělo; soustava absolutně tuhých těles spolupůsobících pomocí nedeformovatelných prvků (ideální závěsy, absolutně tuhé tyče, neroztažitelné závity atd.). Z tohoto důvodu je věta o změně kinetické energie jedinou z obecných vět o dynamice, která zohledňuje působení vnitřních sil.
Člověk se může zajímat o změnu kinetické energie ne v nekonečně malém časovém období, jak je uvedeno výše, ale v určitém konečném časovém období. Pak pomocí integrace můžeme získat:

Zde - hodnoty kinetické energie, respektive v časech - součet celkové práce vnějších a vnitřních sil za uvažované časové období.
Výsledná rovnost vyjadřuje větu o změně kinetické energie v konečném (integrálním) tvaru, kterou lze formulovat následovně: změna kinetické energie při přechodu mechanické soustavy z jedné polohy do druhé je rovna součtu celková práce všech vnějších a vnitřních sil.

Předejte, prosím, tento rukopis redakci - úvodní slovo („Ptám se vás“); Prosím, řekněte mi, jak je statečný! - Celý...
Projekt Cosmos realizují studenti 2., 3., 4. a dokonce 5. ročníku. Děti si rozšiřují znalosti o vesmíru, jeho tajemstvích, astronautech,...
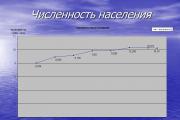
Výuka v oboru „Socioekonomická geografie cizích zemí“ „Sociálně-ekonomický rozvoj...
Definice Mezi jakýmikoli tělesy, která mají hmotnost, působí síly, které přitahují výše zmíněná tělesa k sobě...

Pocit je. Pocit v psychologii. Funkce a typy vjemů Sensation je jedním z nejjednodušších a zároveň...

Učitel: Serebryakova Centrální vzdělávací centrum Taťány Aleksejevny První evropské gymnázium Petra Velikého Technologická mapa lekce...
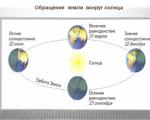
Od pradávna se lidé zajímali o to, proč noc ustupuje dni, na jaře zima a na podzim léto. Později, když...

„Historie naší rodné země“, věnovaná 100. výročí revoluce v Rusku v roce 1917Předmluva K počátku 20. století v...

Jaké zvuky vydávají zajíci škrábání, šustění, chrochtání =)) a když roste, řve! Tyto jsou...
Dědek a stařenka jsou upovídaní. Pohádka!! .... Byl jednou jeden starý muž a stará žena. Stará žena nevěděla, jak mluvit...

Zpět Vpřed Pozor! Náhledy snímků mají pouze informativní charakter...

ÚKOL 19. PUNKČNÍ ZNAČKA VE SLOŽENÉ VĚTĚ S RŮZNÝMI TYPY SPOJENÍ Znění úkolu: místo...
Okolnost je vedlejší člen věty, který označuje znak jednání nebo jiný znak....
Jeho životopis a dílo odhalují osobnost rebela, člověka, který se nepovažuje za éru všeobecného bezpráví...
Projekt Cosmos realizují studenti 2., 3., 4. a dokonce 5. ročníku. Děti si rozšiřují znalosti o vesmíru, jeho tajemstvích,...
Kurz v oboru „Socioekonomická geografie cizích zemí“...